The Fully Networked Car @ Geneva International Motor Show
Workshop 3 - 4 March 2010
|

|
|
|
|
Abstracts
| Day 1 - Wednesday,
3 March 2010 |
|
10:00 – 10:15 |
Opening session |
|
|
Robert Steele, ISO Secretary-General, on behalf of World Standards Cooperation (ITU, ISO, IEC)
|
|
|
|
|
10:15 – 10:30 |
Keynote address |
|
|
Christoph Huss, (International Federation of Automotive Engineering Societies (FISITA)/BMW) |
|
10:30 – 11:30 |
Executive Roundtable I
Moderator: Eric Sampson, UK |
|
|
Christoph Huss, (International Federation of Automotive Engineering Societies (FISITA)/BMW) |
|
|
Juhani J��skel�inen (DG, European Commission, Europe) |
|
|
Samuel Loyson (Orange, France) |
|
|
Raymond Resendes
(National Highway Traffic Safety
Administration, USA) |
|
|
|
|
11:30 – 12:00 |
Coffee break 
|
| 12:00 – 13:00 |
Executive Roundtable II
Moderator: Eric Sampson, UK |
|
|
David Schutt
(SAE International, USA) |
|
|
Russell Shields
(Ygomi, USA) |
|
|
Yasuro Nakanomori
(OKI, Japan) |
|
|
Reinhard Scholl (TSB/ITU-T) |
|
|
|
| 13:00 – 14:00 |
Lunch break
|
| 14:00 – 15:15 |
Technical session 1: ITS worldwide strategies and road operators
Session Chairman: Kevin Borras (H3B media Ltd, UK) |
|
Preparing the way for the
Networked Car in a New World
Economy: Overview of ITS
Infrastructure in South Africa |
Paul J.Vorster
(Intelligent Transport Systems
(ITS) South Africa, South
Africa)
1. Introduction
While “the fully networked car” is closer to becoming reality in some countries, this “holy grail” is still some way off in countries such as South Africa with its “new world economy” which typically experience challenges such as fast urbanization, growing populations and a need to expand its transport infrastructure.
New World Economies typically have transport priorities somewhat different from industrialized nations with established infrastructure that often have legacy systems in place. The absence of such legacy systems means that South Africa can “leapfrog” to state of the art technology when implementing new infrastructure.
Three inter-related developments would assist South Africa to move closer towards the “networked car”. These developments are:
- New freeway infrastructure;
- ITS freeway projects; and
- Open-road tolling on the freeway system.
2. Gauteng Freeway Improvement Project
The Province of Gauteng, the economic heartland of South Africa, generates nearly 38 % of the total value of South Africa’s economic activities. As a result, development in housing, offices, retail and industrial properties has grown significantly over the past 10 years, resulting in above average traffic growth. Unfortunately, provision of road infrastructure has not kept up with the increased traffic demand, resulting in a road and freeway network that is over capacity.
The Gauteng Freeway Improvement Project (GFIP), an initiative of the South African National Roads Agency Limited (SANRAL) will inject approximately €2,6 billion into the South African economy and approximately €1,2 billion into the provisional gross geographic product, creating nearly 30 000 direct jobs over its lifecycle.
Once completed within the next year or so, the initiative that crosses the Johannesburg, Ekurhuleni and Tshwane metropolitan boundaries will widen freeways to at least four lanes in both directions and in some sections up to six lanes.
The first phase of the project will result in the upgrading of 185 kms of the existing freeway network and over the lifespan of the project, a further 376 kms of upgraded and newly constructed freeways is planned to be implemented. The upgraded and expanded freeway network will significantly reduce traffic congestion and unblock access to economic opportunities and social development projects. The network will provide an interconnected freeway system of inner and outer ring roads.
The SA National Roads Agency (SANRAL) is responsible for South Africa’s 16 150km network of non-toll roads and toll roads. The current toll road network is funded via toll fees, while the cost of the non-toll network is borne by National Treasury grants.
3. ITS Freeway Projects
Apart from widening of the freeways, the GFIP project will also ensure that bottlenecks at interchanges are resolved. For the first phase of the GFIP, 34 interchanges are significantly upgraded, including infamous interchanges such as the Allandale, Rivonia, William Nicol, Gilloolys and Elands interchanges. Furthermore, median lighting and an Intelligent Transport System (ITS) consisting of cameras, electronic notice boards and other traffic management features along the national routes will be provided. The ITS system has been successfully piloted on the Ben Schoeman highway between Johannesburg and Pretoria since 2006.
In order to provide a safe, secure and a congestion free road network, the following operations, maintenance and expansion strategy is anticipated:
- The implementation of Intelligent Transportation Systems (ITS) for the effective management of the network. ITS devices such as CCTV will assist in early detection of incident/crashes and assistance/clearance thereof; Thereby a safer and secure road environment can be achieved. This has been successfully piloted on the Ben Schoeman-freeway between Johannesburg and Tshwane since 2006;
- Focus on promotion of public transport through the proposed scheme – high occupancy vehicle lanes which will allow for development of Bus Rapid Transit (BRT) in the future;
- Travel Demand Management (TDM) such as High Occupancy Vehicle lanes.
- The provision of lighting which is required for ITS and will improve roadside security;
- Route patrol services, and close relationships with emergency services to assist road users in the event of breakdowns or where incidents/accidents occur.
3.1 Description Of Its Infrastructure/Systems For ITS Projects
The following systems are implemented:
- Integration and management software
- Fibre Optic communication Backbone for communication between the field devices and the Network Management Centre
- CCTV Cameras
- Variable Message Signs
- Inductive Loops traffic monitoring equipment
- Ramp Metering
- Electronic Vehicle Identification readers at approximately 3km intervals
- Wire line (fibre)
- Wireless communication
- Traffic detection equipment
The field devices are linked to, and integrated at a Network Management Centre.
3.2 Network Management Centres
The Network Management Centres (NMC) is responsible for receiving all the inputs from the different sensors deployed via a communication backbone, to process them and to provide the required output. In basic terms the role of the NMC is to execute an overall co-ordination function due to the large amount of role players and existing centres.
The following main functions will take place at the NMC:
- Visual monitoring of the network from real time video feed
- Detection of incidents by means of information received from field devices
- Determination of travel times on the road network
- Dissemination of information to the public by means of radio reports, variable message signs, a web site, sms’s, etc
- Direct liaison with emergency services for the effective management of incidents
- Direct liaison with Public Transport call centre to inform about: Traffic conditions, Incidents, Traffic Prediction, and Planned Events Debriefing sessions with affected parties after incidents
- Pre-event planning meetings
3.3 Motorist/Public Transport Information
Dissemination of information to road users, public transport operators and commuters is one of the primary services provided by the Network Management Centre. Information is the activation of a variety of communications media to relay traffic conditions and location of incidents to road users, public transport operators and commuters. The information assists them inter alia, in selecting their mode of travel, route, and departure times. By influencing motorist behaviour (by recommending diversion routes around an incident, for example), authorities can improve travel conditions and traffic flows. Motorist information can be categorized as either pre-trip or en-route.
Pre-trip information can provide the motorist with current roadway and/or transit information prior to deciding upon the time, mode, and route of travel. Whether provided to motorists at home, the workplace, or multi-modal locations, this capability can help relieve congestion by giving the motorist the information to reroute, delay start of the trip, shift modes, or avoid travel altogether.
-
Pre Trip Information
On-Line services to access the Internet represent a means to disseminate pre-trip traveller information. The Internet’s effectiveness as a fast and flexible communication medium has spurred explosive growth in all sectors of society. A web site will be constructed for the Gauteng freeway network that will show:
- Real-time traffic flow information via colour -coded maps
- Expected travel times between different points on the freeway network
- Road closure information (e.g., for construction or maintenance)
- Real time video images (still captures or streaming video)
- Camera selection
- Travel advisory information for route planning
- Links to other web sites
Pre-trip traffic information will also be available via radio reports, SMS services and a call centre.
- En-Route Information
Traffic information is also forwarded to radio stations and possibly television whereby the public can receive updated information before or while they travel.
In the near future, users will be able to subscribe to an SMS service that will provide them with information about incidents as well as progress with the clearance thereof.
In order to communicate with the public while travelling, variable message signs are placed at strategic positions that allows the operator to give information about incidents, road works etc. by means of pre programmed messages. There are also electronic signs placed at high accident spots such as Buccleuch and New Road that warn travellers automatically to slow down when a queue is building up in front of them.
4. Open-Road Tolling
On completion of the first phase of the project by early 2011, GFIP will operate on an open-road tolling system with revenue collected and utilized in order to improve the road infrastructure, service debt already incurred on for the upgraded freeway network in Gauteng and ensure a well-maintained and upgraded road network into the future. The ‘user-pay’ principle indicates that future congestion in Gauteng will be minimised as SANRAL fosters a sufficient revenue stream to upgrade the infrastructure in line with road demand. The €120 million ORT project is being implemented by Electronic Toll Collection (pty) Ltd, a joing venture between Kapsch and Traffic Management Technologies from South Africa.
Open-road tolling will conduct transactions electronically on a strictly user-pay system. Physical tolling booths will be eliminated – thus eradicating delays and vehicle emission associated with stop-start driving. Motorists will be required to register as a user to obtain the transponders that are fitted in vehicles. The transponders detect movement whenever the driver passes under gantries situated approximately every 10km along the freeway network.
Tolling will take place via an open road toll system, meaning that all transactions will take place fully electronically at toll collection locations identified for the network. Therefore no physical toll plazas will be constructed, and vehicles will therefore not be required to stop or even to slow down, for tolling to take place.
Vehicles will be issued with a tag and as the vehicle passes under gantries, placed approximately 10 km apart, an automatic transaction will take place. Vehicles of day visitors, rental vehicles and/or those who do not have transponders will be photographed and accounts submitted for payment.
The project is also designed to ensure inter-modal facilities between Metrorail, the Gautrain, bus and taxi routes, giving people an opportunity to use public transport or vehicle sharing as an alternative to the use of single people in a vehicle, which adds to the current congestion.
5. Conclusion
Deployment of the open-road tolling system will provide communication and technology “layers” on the GFIP road network, which together with the growing awareness of the benefits of ITS deployment, could pave the way for the networked car in South Africa.
|
|
Towards ITS with NGN, a Japanese
long term perspective |
Sed Saad (Waseda University, Japan)
For Malcolm Johnson (ITU news, march 2007), ITU has been looking at how Telematics fit into NGN. From the next generation networks (NGNs) viewpoint, networked vehicles are similar to other types of mobile terminals. Networked vehicle in the context of NGN identifies the relationship between NGN and networked vehicle taking consideration of necessity to support vehicle oriented communication. In this context, broadband IP capabilities through fixed mobile convergence (FMC) are under consideration to support new applications and services.
Ubiquitous Networking and ITS in Japan
The author claims that NGN is an intermediary step in the convergence of networks while Japan has been working on Ubiquitous Networking (UN), a more advanced step. The author will make some comparison on ITU efforts to connect ITS to NGN and Japan’s efforts to connect Ubiquitous Network with ITS. This presentation aimed the role of telecommunication in ITS in order to understand Japan efforts related to ITS and the Japanese project of Ubiquitous Society.
|
|
Customer-oriented networked car : results from the observatories of cluster � P�le V�hicule du Futur � |
Bruno Grandjean
(P�le V�hicule du Futur, France)
The main activities of the French cluster P�le V�hicule du Futur (www.vehiculedufutur.com) are the design, manufacture, experimentation and deployment of light urban and peri-urban transport solutions.
The cluster therefore builds collaborative R&D projects in the fields of urban and periurban mobility solutions, ITS, vehicles (components or carbon-free complete vehicles)...
But it also puts a strong focus on the end-user, and has established a couple of observatories to study market trends and expectations :
- DEC'AUTEX (vehicle interior and its interactions with the humans on board)
- Les Mobilistes (mobility issues seen through the end-user's eyes)
Based on � qualitative � studies, we can say as a starting point that generally � normal � people do not spontaneously state networking among the improvements they are waiting for in their cars : this field is largely ignored by the public.
But no (few) spontaneously-stated requirements do not mean that there are no latent needs or unconscious wishes (for example, the iPod and its followers were not expected, nevertheless they took roots in the mobility environment...), even if people are generally not able to understand the differences between applications that require networking and those using � simple � on-board telematics : anti-collision systems, improved traffic information, police-presence warning... are among the best-loved applications, provided that their cost remain low.
Two key point are the ability of the new products to be as � transparent � as possible, without any additional annoyance for the driver, and the pre-existence of a real latent need (not as simple to detect as it sounds).
We will quickly review customer input for some of them.
Moreover, expectations of public autorities and these of the public are not always in line : the example of traffic information highlights the subtle balance that sometimes has to be achieved.
|
| The connected vehicle - driven by consumers or policymakers? |
Robert "Cone
(Chair, Permanent International Association of Road Congress (PIARC) / International Federation of Automotive Engineering Societies (FISITA) Joint Task force for the connected vehicle)
The connected vehicle – driven by consumers or policymakers?
The PIARC-FISITA Joint Task Force has been established to ensure that PIARC (The World Road Association) members and FISITA members are well informed about the opportunities and challenges arising from the advent of the connected vehicle. The task force is organising workshops in different arts of the world to obtain ideas, evidence and information.
The Business Driver
Many of the discussions so far have focussed on the business case. In a macro-economic sense the business case is firm but is dependent on a number of different stakeholders working together to create combined benefits. Taken individually there is, at present, no one sector which has sufficient gravity to accelerate deployment except, perhaps, road safety. A catalyst is required?
Governments- the policy driver
Safety is stop of the agenda for most governments. There is universal agreement that road casualties remain too high, even in those countries with good track records. Further gains will be difficult, requiring a change of attitude to driving, management of speed, and active safety systems.
Congestion and overcrowding is another issue. Unable to build out of congestion policymakers have invested to make more efficient use of the road s that are available by maximising throughput through measures such as lane control, speed management and traffic signal co-ordination. Connected systems can help, both in the urban and interurban environment. Who will take this forward?
There are the “green” issues. The European “eCoMove” project suggests that connected applications could realise as much a 20% fuel and emissions savings. Is the green movement a driver towards the connected vehicle?
The vehicle driver
Today’s driver operates in a difficult environment. Traffic density is greater than ever before. Regulation is complex and enforcement strong and, increasingly, automatic. 97% of collisions can be attributed to driver error. Connected vehicle technology has the capability to make sure drivers remain safe and legal. Will they be prepared to pay the price?
The private vehicle and the haulage industry are an essential part of modern life and the modern economy. The private car fulfils functions that can never be replaced by public transport or a logistics system. However, the driving population is getting older and more vulnerable. Connected vehicle technology offers the capability to assist them and others. Is it possible that demographic changes will drive technology?
The manufacturer/ - customer relationship
It is too easy to focus on the Automobile companies as the key manufacturers. They are powerful players but the management of road transport involves a diverse range of technology industries.This mixed bag of manufacturers and applications developers each have different product lifecycles. Road engineering suppliers have product lifecycles of 20 years. Vehicle manufacturers and those supplying traffic equipment have product lifecycles measured in years or tens of years. At the other end of the scale applications developers and aftermarket suppliers have product lifecycles which may be measured in months. Will consumers be prepared to invest in vehicles with technology which will be obsolete long before the vehicle requires replacement?
Will the automotive industry lead the development of the connected vehicle? Will it be able to work with, the service organisations and the aftermarket companies to provide a sustainable upgradable level of support for applications?
The role of standards
Each of these players has to interact. For this to happen there has to be an established set of standards, either de-facto or formally agreed and defined standards.
The views expressed in workshops suggest that while the full suite of standards is not fully complete this is not an area which is constraining development. When will standards be stable and available to ensure interoperability? Will the same standards apply throughout the world?
Conclusions – the way forward
The early findings of the JTF suggest that technology is not the leading issue. Good progress is being made with the development of standards and there is collaboration on a world stage. Preliminary discussions have lead to the development of a scenario for deployment.
The first element of deployment is the continuation of the progressive development of the intelligent vehicle, more intelligence providing a greater assistance to the driver at each technical iteration and finally an “I am here” message.There is little investment required for the infrastructure. The second element involves governments. They will need to find ways of increasing the proportion of the fleet equipped with active technology, using regulatory levers to encourage take up of a minimum set of safety features. The USDOT has set an objective to be in a position to be “…able to regulate a minimum set of functions for 2013”.
This scenario minimises the contribution from the infrastructure. However, the benefits of infrastructure engagement should not be lightly dismissed.
There is one final part of this jigsaw which is the application which captures the imagination of the travelling public and could create the business case which changes everything. So far it has not been identified, or is a well kept secret.
The work of the task force concludes with a report for the PIARC World Congress in Mexico in 2011.
|
|
|
|
| 15:15 – 16:30 |
Technical session 2: Human Machine Interface (HMI) and signal processing for Intelligent Transport Systems (ITS)
Session Chairman: Hans W.Gierlich (Head Acoustics GmbH, Germany) |
|
Speech Technologies in Cars and
the Role of ITU-T |
Hans W.Gierlich
(Head Acoustics GmbH, Germany)
Modern cars increasingly in-cooperate the speech technologies in order to assist the driver and to provide more functionality to the users. Typical technologies used in cars of today are:
- Speech recognition systems
- Speech dialog systems
- Speech enhancement for communication systems
- Hands-free communication
- Enhanced in-car communication systems between passengers
All technologies may be used just inside the car where the interoperability of the different components in the car infrastructure has to be guaranteed but they may also work in con-junction with the network and network components. So besides the proper integration into the car infrastructure also a seamless and proper interworking with the telecommunication networks has to be achieved.
A major effort has been undertaken of the last years in ITU-T Focus Groups FitCar and Car-Com in order to develop performance criteria and testing procedures for hands-free commu-nication in motor vehicles. In the standards currently available narrowband telephony but also wideband telephony is already addressed. An overview is given about the achievements so far and the excellent interdisciplinary work between the telecom industry, the car industry, the suppliers as well as universities.
Speech recognition technologies used in the car environment require specific preprocessing enabling speech recognition systems to easily recognize the spoken language. Proper speech recognition is also prerequisite for speech dialog systems. The type of preprocessing and the necessary requirements for the seamless interaction with the car components will be a study item for the future work in Focus Group CarCom.
Another study item for the new Focus Group will be in-car communication systems – systems which enhance the speech intelligibility in the car between all passengers. These types of systems may also interact with the car hands-free systems. An overview about the work re-quired will be given in the talk.
|
|
Connected speech in cars |
Udo Haiber (SVOX, Germany)
Today ubiquitous computing is no longer a trend it is reality: for example,
if you went out for dinner with friends in the past, there was sometimes
an issue during the conversation, which was not 100% clear, and everybody
was happy with this uncertainty. But today you will be faced with an armada
of iPhones and Droids to clarify the latest detail. Thus the “always connected”
offer raises demand, which is expected to be satisfied also while driving.
At this crossing between mobile computing and driving Speech is the enabling
technology. The talk will look into the effects of this habit change, which
could be observed on the user side, the stakeholders for in-car infotainment
devices and will focus on the consequences for speech technology.
|
|
Use of voice technology (TTS and
ASR) as an interface between the
driver and the vehicle |
Paolo Coppo (Loquendo, Italy)
Starting with an analysis of user expectations in terms of speech interaction with the vehicle, the presentation will discuss today’s most popular applications, such as turn-by-turn directions incorporating spoken street names, voice destination entry and hands-free phones, and the speech technology and design factors that will make or break your application.
Besides the relatively simple applications mentioned above, a new wave of use cases is emerging.
For business drivers, transforming “idle” (=driving) time into “productive” time means an increase in efficiency. Checking and sending emails, and managing a diary, all without visual involvement is a clear example of the value speech interaction while driving can have in improving safety.
The same is true on the entertainment side, e.g. with voice-control of your media player.
Notably, most of the speech applications you could imagine using in the car are already present on smartphones, but their implementation is not optimized for in-car usage. Onboard units, on the other hand, can optimize voice interaction but have to address the problem of data access, synchronization and duplication.
Achieving the perfect balance of Competition vs. Cooperation among the on-board units and their mobile counterparts (PNDs, mobile phones) in providing the complete set of telematic services we all need (communication, navigation, entertainment) is key to an effective implementation of voice-enabled interfaces.
Here connectivity plays a key role in allowing real-time access to information (e.g. search engines); services (e.g. navigation) in a web 2.0 paradigm; and resources (server-based speech engines).
What’s next? Breaking through the barrier of rigid, menu-driven interaction to arrive at a more natural interaction: giving us the illusion that our car has now been equipped with a Personal Assistant ready to respond to our every command.
|
|
Automated Detection of Road
signs |
Adda Ali-Pacha,
Naima Hadj Saidi,
Abdallah M’hamed
(University of Oran (USTO),
Algeria and Institute of Telecom
& Management, France)
More and more deaths and damage are registered on our highways, the figures are
appalling and the finding is real. The authorities have provided a lot of efforts to reduce the
death toll. In fact, they conducted a series of enhancing road safety such as: revision of the
driving code, strengthening the road sector, etc.... Obviously, these interventions have yielded
results, but they are not satisfactory, and our work is projected in this respect. First, we
highlight the importance of road signs; also we propose a procedure to automate the
detection and interpretation of road signs from vehicles. The driver spends much of his
activity in the perception and recognition of road signs, he may be distracted for a moment if
he takes a long trip or if he is tired. Assisting the driver from this omnipresent requirement is
strongly recommended.
Signalisation is an integral part of the highway landscape. It is an essential
communication tool for the road user. It must therefore be designed and installed so as to
assist the road user throughout his career by allowing him to adapt his behaviour to various
situations he faces, avoiding him hesitations and false moves. It should enable him to
anticipate any move or change direction and allow him to prepare himself and to guide him
by showing him the way to follow and the dangers to avoid (curve or slope pronounced
shoulder soft, slippery, etc..), signalisation recalls the various code requirements of road
safety. The road signs code must be clear and understandable by all. The signal is composed
of signs, pavement markings, and lights. For the sake of clarity, it uses few words and many
symbols. Mostly, the signs have a meaning at first start.
Signalisation symbols are largely standardized by standards that reflect international
conventions. To automate the acquisition of the message from the signs, we use a code bar to
represent the signs. The code bar is a representation of a given numeric or alphanumeric
form of a symbol consisting of bars and spaces whose thickness varies according to the data
symbol and coded data. The information can be encoded as binary words to enable a rapid
and automatic acquisition of data by the computer dashboard. The dashboard consists of a
set of indicators and controls that inform the driver of the vehicle about the engine and the
driving parameters (current speed, outside temperature).
Violations of the traffic signals are the causes of many road accidents and are the results of
thousands of victims each year. The new system we propose could minimize the problem
sensibly. After acquiring the code sign, the specified computer on dashboard interprets and
proposes an adequate driving, while ensuring its function.
|
|
|
|
| 16:30 – 17:00 |
Coffee break |
| 17:00 – 18:30 |
Technical session 3: ITS-Networking, architecture and protocols
Session Chairman: Denis Griot (Freescale Semiconductor Inc.) |
|
Architecture and Technology for
Context-Driven Disruption
Tolerant Networking for Vehicle
Applications |
Wai Chen,
Jasmine Chennikara-Varghese,
Ratul Guha,
John Lee,
Junichiro Fukuyama,
Ryokichi Onishi,
Rama Vuyyuru (Telcordia,
USA, Toyota, Japan)
Recently there have been much efforts to integrate communications and computing
technologies into vehicular and transportation systems. The goal of these efforts is to
improve driving safety, reduce traffic congestion, and enable other information
applications. In this paper, we will discuss our recent results in developing architecture
and technology for disruption tolerant networking with the objective to enhance the
reliability of packet delivery in an environment where communication connectivity is
limited due to low density of equipped vehicles.
We will first outline some vehicular traffic management application scenarios to motivate
the disruption tolerant networking. Our particular focus is on-demand traffic information
for vehicles to avoid congestion. We will then describe architecture and protocol of a
context-driven disruption tolerant network (C-DTN) which seeks to reliably deliver
useful information to individual vehicles. We will describe examples of context, and
highlight key components of the context-driven architecture and protocol. Finally, we
will evaluate performance and assess feasibility of C-DTN for information dissemination
and anchoring in wide area with limited density of equipped vehicles. We will highlight
key tradeoffs of networking performance (e.g., delivery ratio, latency, freshness) vs.
realistic vehicle mobility and roadway traffic patterns.
Finally, we will conclude by outlining key open challenges in disruption tolerant vehicle
networking.
|
|
Real Time Ethernet |
Helge Zinner (Continental
Automotive GmbH, Germany)
Vehicle networks and services differ from consumer networks and applications in numerous
characteristics. Besides the compatibility issue to connect external devices and networks, future
requirements drive the need for new network technologies. The approach described in the
following, proposes a migration from a MOST to an Ethernet based network solution.
Nowadays, the MOST network technology is commonly used to deploy infotainment systems.
However, the scope is limited due to high costs of hardware and difficulties in interfacing with
other devices/networks. Ethernet based networks are already applied in fields with similar realtime
requirements such as industrial environments and airplanes. The Ethernet based Audio
Video Bridging standard shows interesting results in meeting timing requirements for multimedia
networks. The enhancements to 802.1 guarantee delays of two milliseconds and a maximum jitter
of one microsecond but still the standard Ethernet frames are being used.
Therefore we investigated the use of AVB as in-vehicle infotainment network for three main
objectives. One is the evaluation of Ethernet to fit automotive requirements. Another proposal is a
step by step migration using a Bridge reusing existing MOST components. Furthermore we
suggest a scalable technology which is able to be used beyond the limits of the infotainment area.
Ethernet/IP networks have more degree of freedom than MOST networks. The use of switched
Ethernet leads to higher flexibility and scalability for vehicle networks at lower costs.
Josef Noebauer,
Thomas Gallner,
Norbert Balbierer (Continental
Automotive GmbH, Germany)
Energy management in modern vehicles comprises the ability of enabling only a subset of the
available components, depending on the vehicle’s current state. Energy can be preserved if systems
which are not needed are being deactivated. Today’s bus systems like CAN, LIN, MOST and FlexRay
offer the ability of enabling or disabling the ECUs that are connected to the bus (“bus wakeup”, “bus
sleep”) and form a closed subsystem in terms of energy management.
At present, the use of the Internet Protocol (IP) as a car wide network protocol is being investigated.
Ethernet, standardized by IEEE 802.3, is one possible physical layer often used in IP networks.
Because it is common in many consumer local area networks it is well developed, standardized and
widespread. Thus, it is obvious to use Ethernet as physical layer in an automotive IP based network.
What we are presenting is an approach to support energy management mechanisms comparable to
those in other automotive networks. Our concept describes a way to remotely activate and deactivate
subsystems over an Ethernet network. Furthermore, it allows activation and deactivation of single
ECUs, and therefore increases overall flexibility of the system’s configuration management.
As a result, components which are not needed can be dynamically deactivated, even if they consist
only of a single ECU or are part of a subsystem which should not be deactivated completely. Thereby
the quiescent current of an ECU’s network interface has to comply with automotive requirements,
especially when the ECU is in a power down state from which it can be remotely activated.
|
|
The GeoNet project: combination
of IPV6 and geonetworking |
Thierry Ernst (Institut
national de recherche en
informatique et automatique
(INRIA), France)
Supported by the Car-to-Car Communication Consortium, GeoNet is a FP7 project started in February 2008 and completing in February 2010. The GeoNet (www.geonet-project.eu) partners form a well-balanced European consortium with 7 partners from 6 different countries including one of the new member states of the EC. It comprises two Research Institutes, one SME and four industrial partners.
GeoNet finds its root into the requirements for next-generation vehicles to be able to exchange information beyond their immediate surroundings and line-of-sight with other vehicles as well as with the road infrastructure and Internet peers. The exchange of information with vehicles located in a particular geographic area - potentially far away from the information source - requires specific reliable and scalable communication capabilities. We refer to these capabilities as geographic addressing and routing (geonetworking). In situations where the exchange of information has to transit through the Internet it is necessary to combine geonetworking and IPv6 into a single communication architecture, that we refer to as IPv6 geonetworking.
Now coming to an end, the GeoNet project has delivered an architecture combining IPv6 and geonetworking and a reference specification of the modules composing this architecture. Two independent Linux-based prototype implementations have been developed to ensure the completeness and unambiguity of the GeoNet reference specification. This ensures greatly enhanced software quality and stability. Implementations are platform-independent and can easily be incorporated into existing co-operative systems architectures, such as ETSI TC ITS and ISO TC204 WG16 (CALM).
The compliance of implementations with GeoNet specifications and their expected performance, scalability and efficiency have been assessed during conformance tests and field trial experiments conducted using actual vehicles. An emulation environment including emulated and real radio modules has been developed to validate implementations in scenarios traditionally too complex to be performed in field tests. A final demonstration of IPv6 geonetworking is scheduled in January 2010.
The GeoNet project is delivering its final results at a key moment given the ITS mandate from the European Commission and forthcoming pilot tests. IPv6 geonetworking will enable subsequent large-scale field operational trials (FOT) and facilitate the future development of more complex functions useful to cooperative systems. IPv6 geonetworking will open the path for better road traffic efficiency, increased safety and value-added services.
|
|
Development of a open-core
Flexray Controller for OEM
ultra-low cost automotive
applications |
V. Pramod,
Subrat Kar (Bharti
School of Telecommunication
technology & Management, Indian
Institute of Technology Delhi,
India)
We describe the implementation of a opencore
Flexray protocol controller designed for OEM ultralow
cost automotive manufacturers. The soft core operates as a standalone controller or can act as
peripheral to any processor such as PowerPc or soft processors. The final design will also have three
operating modes allowing the user to select the level of Flexray implementation. The source code will
be available to the open source community, so that it can be used by industries, developers, and
universities for further development. Currently there are no open core architecture for Flexray, although
many universities have developed middleware application for Flexray controllers.
|
|
Gateways: latest evolution in
vehicle networking |
Marc Osajda (Freescale
Semiconductor Inc.)
This session will analyze the trend in terms of in vehicle networking. Multiple electronic control units (ECUs) are interconnected inside the vehicle using multiple networks: CAN, LIN, FlexRay, MOST, PSI5, Ethernet, all of them are present in some vehicles, creating an overcomplicating vehicle electrical network.
New vehicle architecture with more focus on domain controller and high bandwidth network are starting to emerge. In addition to high bandwidth network the emergence of centralized gateway in charge of controlling the exchange between the different domain controller is confirmed. It can be expected that these Gateways will be the future central point for C2X applications.
Freescale is actively working in developing innovative solutions to address those new requirements.
The topic of functional safety and the impact of the upcoming ISO26262 standard to the semiconductor industry will also be briefly introduced.
|
|
|
|
| Day 2 - Thursday, 4 March 2010 |
|
9:30 – 10:45 |
Technical session 4:
Standards Roundtable
Session Chairman: Bernard Dugerdil (Freescale Semiconductor Inc.) |
|
The Economic Benefits of
Standards in the Automotive
Industry: Results of an ISO
Study |
Daniele Gerundino
(ISO) |
|
Round table |
|
|
ITU-T (Study Group 5, Study Group 16, Study Group 13)
|
Yushi Naito, Study Group 16 (Multimedia) Chairman
ITU-T SG16, has been performing Networked Car-related studies as the Lead Study Group on multimedia coding, systems and applications, on ubiquitous applications ("e-everything", such as e-health) and on telecommunication/ICT accessibility for persons with disabilities.
After the brief introduction of ITU-T SG16, the area of studies in which SG16 is currently engaging is explained.
In Question 18 of Working Party 1 (WP1), titled “Interaction aspects of signal processing network equipment” recently generated a new Recommendation ITU-T G.799.2, “Mechanism for dynamic coordination of signal processing functions” which aims the dynamic coordination of Signal processing functions throughout telephone connection. Recommendation ITU-T G.799.2 is so to say an umbrella Recommendation and specifies the principle of the coordination. Detailed specifications for implementations will be followed as the series of Recommendations.
Question 27 (WP2), titled “Vehicle gateway platform for telecommunication/ITS services/ applications” has started its studies on the requirements in terms of services and functions to support V2V and V2I, on the functions of vehicle gateway and its reference model(s), on the open interface between in-vehicle network and ICT devices and on the relevant necessary protocols to support vehicle oriented services/applications. Question 27 identifyed the urgent needs for the standardization of 1) the interface between the In-vehicle Network and Vehicle Gateway, 2) wireless/wired communication interface between Vehicle Gateway and ICT devices and 3) the interface between Vehicle-to-Vehicle communication. They are now working for the draft Recommendation on Service and functional requirements of vehicle gateway platforms (F.VGP-REQ)
Among the Multimedia system/application Questions in WP2, Question 21, 22 and 25 are the key Question for studying networked Car applications. SG13 regards the Networked Car as a part of Home Network in NGN, and SG16, in collaboration with SG13 is working on the Home Network/ Ubiquitous Multimedia applications. In that context, WP2/16 questions will actively involved in developing Recommendations for Networked Car applications.
The last aspect SG16 would like to emphasize is the introduction of ICT/human accessibility design into the Networked Car. SG16 has been taking the Lead Study Group’s roll for telecommunication/ICT accessibility for persons with disabilities. Q.26 has developed Recommendation ITU-T F. 790, “Telecommunications accessibility guidelines for older persons and persons with disabilities” and Accessibility Check List for drafting new Recommendations. These works are not only dedicated to Connected Vehicles, but also can be applied for them.
SG16 understand that there have been so many SDOs and forums involved in this field, and avoiding the overlap of the work should be necessary. SG16 is open to collaborate/coordinate with you in Networked Car standardizations.
Chae Sub Lee, Study Group 13 (Future Networks) Chairman
|
|
IEC |
Cyriacus Bleijs (IEC/TC69 Chairman) |
|
ISO |
|
|
ETSI |
G�rard S�garra
(TC ITS/WP1 Chairman) |
|
C2C |
Soeren Hess (Car-to-car Consortium (C2C) Chairman) |
|
|
|
| 10:45 – 11:15 |
Coffee break |
|
11:15 – 12:45 |
Technical session 5:
Electric vehicles and Climate Change
Session Chairman: James Rosenstein (ITS Consultant) |
|
The Smart Grid and Electric
Vehicles: Standardization Issues |
George W. Arnold
(National Institute of Standards
and Technology (NIST), USA)
The U.S. electric grid is owned and operated by over 3100 utilities,
using equipment and systems provided by thousands of suppliers, delivering
power to hundreds of millions of users and billions of end devices. The
transformation of this infrastructure into an “energy internet” is a huge
undertaking requiring an unprecedented level of cooperation and coordination
across the private and public sectors. A robust, interoperable framework of
technical standards is the key to making this possible. Recognizing the
complexity of the task, Congress assigned the National Institute of Standards
and Technology the responsibility to coordinate the development of standards
for the U.S. Smart Grid. In this talk we will explain how this work is being
done, explore the conceptual reference model of the Smart Grid and related
standards that are emerging, and discuss some of the standards challenges
that need to be addressed in supporting wide-scale use of electric vehicles.
|
|
Project EDISON: Networking in a
Vehicle to Grid (V2G) project |
Bernhard Jansen
(EDISON Project, IBM,
Switzerland)
The Danish Research project EDISON has been launched to investigate how a large
fleet of electric vehicles (EVs) can be integrated into an electric grid in a way that
supports the electric grid while benefiting both the individual car owners and society
as a whole through reductions in CO2 emissions. This concept is known as vehicle-togrid
(V2G) technology. The potential win-win situation for the EV owner and the
electric grid when implementing V2G is likely to speed up the widespread
introduction of EVs and the adoption of smart grids. The project partners include
energy companies, technology suppliers, and research laboratories and institutes. The
aim is to perform a thorough investigation of the challenges and opportunities of EVs
and to deliver a technical platform that can be demonstrated on the Danish Island of
Bornholm.
This talk focuses on the ICT-based part of the project. Emphasis is put on the
communication and data-exchange requirements between the EV and the control
entity of the smart grid, and how these will interact with existing and future
communication infrastructures.
There are various communication technologies that must be integrated in the
V2G concept. In the access control of the individual vehicles at the charging station,
RFID technology can play an important role. The requirements for such RFID-based
access-control systems at charging stations and for the integration of vehicle and
charging-spot access control systems are presented. Hereby the focus is on the
prerequisites to ensure a reliable charging without unintentional interruptions by third
parties.
For the daily operation of these EVs not only the physical but also the cyberspace
security in data and control-command transmission is crucial. The two most
popular communication methods to control the charging of an EV are price
broadcasting and direct session-based control as specified in IEC 61850. A
comparison of the two methods in terms of network bandwidth needed, robustness,
and security will highlight the importance of security in data and control-command
transmission.
The talk will also discuss key EV user requirements. One major user
requirement, for example, is privacy, which must be respected in all communications
of the EVs.
|
|
Electrical Mobility and Climate
Change |
Ziva Patir
(Better Place, Israel)
The presentation will elaborate the following aspects:
1. What happened since the last seminar on “Fully Networked Car”?
- Technology
- Policy
- Standards activities
2. How does mass deployment of Electrical vehicles affect climate change?
- Studies to show different scenarios of the influence of EV’s deployment relating to the composition of the energy source – externalities studies
- Studies to show the effects of battery exchange stations
- Studies to show the energy efficiency of smart grid charging comparing to random charging
3. What did not happen and how redundant efforts jeopardize the speed of the electrification of mobility?
4. What could have happened in the area of Standards: International, Regional, and National?
5. Other activities to support the future change:
- Certification
- Regulations
- Consumer issues
- Policy setting
6. Better place solution as an example to show how all the different activities fit in.
|
|
Data Networking in Cars and
their Effect on Climate Change
and Vehicle Efficiency |
Steven Jeremy
Ntambi (Vehicle Design Summit,
Africa)
Transportation drives global oil trade and is a key environmental challenge, especially in cities. The world turns nearly five trillion liters of oil per year, half of it for transport, into the roughly 42 percent of global carbon dioxide emissions reported by the International Energy Agency in its 2005
World Energy Outlook. Oil also has direct and hidden costs -- climate change, insecurity, geopolitical rivalry, price volatility, and degradation of economic and social development.
Therefore the ROJE Engineering Services is aimed at proposing a way on how a fully networked car can penetrate the existing market. A model study was done in 2008 by the development of a prototype 4-passenger, Data Networked, 200 mpg, high-performance production ready plug-in series hybrid car with minimal life cycle costs, codenamed Vision200. From this, ROJE Engineering is moving to penetrate the market gradually until such a time when the market will be dominated by fully networked and environmentally friendly vehicles.
ROJE specifically hopes to start on this journey by developing an initiative analogous to the one that was created during the Vehicle Design Summit project. However, this will be done by starting by converting existing vehicles into either hybrid electric vehicles or having the vehicles run on an alternative green energy. In this, ROJE seeks to partner with various interested groups to see this idea come to a reality. And then sub-sequentially move to the development of a fully green and networked car.
From the market study done, the developing nations such as African Nations, India and China would have great reception to this development. Being that they contribute a substantial percentage of the global market, the impact would then spread to other nations including the developed nations. For this reason, we really believe that Africa India, China and most of the Eastern Orient are very virgin grounds for this development, and considering their economic status, having partners in the start especially financially would make the idea very affordable to those markets.
|
|
Green GT Car |
Jean-Fran�ois Weber (GreenGT SA, Switzerland)
Race car should be an example and present the “future” to the public. Why Race car could not be “clean” before all Street cars ? With new technologies, It is a strong challenge to create this year first race cars fully clean and present it to the public to use this image for change mentality.
The all-electric Race car – made in Switzerland- GreenGT
Swiss High-tech hides under the conventional skin of this two seater prototype race car. The GreenGT is the first all electric race car with a FIA homologated carbon fibber chassis. Two battery packs with a total of 35 kWh feed their electricity to two synchronous three-phase motors of 150 kW peak power each. Thus, 10 to 15 laps of a typical Grand Prix track can be done at race pace in the GreenGT.
|
|
|
|
| 12:45 – 13:45 |
Lunch break |
|
13:45 – 15:00 |
Technical session 6:
Wireless systems and technologies I
Session Chairman: Jack Pokrzywa
(SAE, International, USA) |
|
The Benefits of Enabling a Fully
Autonomous Vehicle with Wireless
Communications |
Ryan D. Lamm
(Southwest Research Institute
(SWRI), USA)
Work in cooperative vehicle systems is continuing to evolve in the US, Europe, and in
Asia both in terms of private industry research and development (R&D) as well as in
government sponsored initiatives. Additionally, as active vehicle safety systems are maturing
they are taking on more responsibility in the form of actual control of the vehicle when an
accident is imminent (mitigation braking, etc.). Work has been ongoing for years for defense
applications in terms of unmanned systems where the vehicle is in complete control of itself
and commercial technology is being leverage in these activities. R&D associated with
interfacing an autonomous vehicle to a larger cooperative system, where the autonomous
vehicle still remains in control but interacts cooperatively with other entities in the
environment (other vehicles or the infrastructure) has some unique advantages both from the
standpoint of the autonomous vehicle as well as for the larger cooperative system. This
presentation will describe ongoing research by SwRI� in terms of integrating wireless
communications into an autonomous vehicle in an effort to improve the situational awareness
and behavior of a cooperative system. International collaboration activities in cooperative
sensor sharing, along with recent public demonstrations of this technology, will be showcased.
|
|
A Vehicle Communication Scheme
to Achieve Optimal Cooperative
Positioning |
Asghar Tabatabaei Balaei
(University of New South Wales,
Australia)
Vehicular communication has been originally developed for safety and collision
avoidance application. The communication channel dedicated to this application
is called Dedicated Short Range Communication (DSRC). In this application precise
position of the vehicle is needed. Position with this level of precision cannot
be achieved by Global Navigation Satellite Systems (GNSS). A solution to this
is cooperative positioning which has been proposed and studied lately in the
literature of car navigation and positioning. In cooperative positioning,
the network communication is exploited to improve the accuracy and availability
of the vehicular positioning system. There is number of different approaches
in cooperative positioning each of which is appropriate for some specific
scenarios. In one of these approaches, position information and distances
between vehicles are communicated among the vehicles in the neighboring
cars and this information is used positioning algorithms and passed through
smoothing filters to improve the positioning. The point which has not been
attended by the literature is the effect of this on the network communication
constraints such as latency and packet loss and eventually the effect of that
on the position estimation error. Cramer Rao Lower Bound (CRLB) is a parameter
to evaluate the quality of estimators. This parameter is considered as a bench
mark for position estimation error. Important network communication parameters
include but are not limited to message generation rate, packet size and vehicle
density in the network. In this paper first the characterization of the effect
of these parameters on CRLB is studied. It has been shown that there is optimal
value for these parameters to achieve minimum position error. Secondly based on
this characterization, an optimal communication solution is presented to achieve
minimum position error within the explained context of vehicular cooperative
positioning.
|
|
Security Risk Analysis Approach
for on-board Vehicle Networks |
Alastair Ruddle (MIRA Ltd., UK)
Secure and trustworthy on-board
IT systems are essential for the
success of intelligent transport
systems based on
vehicle-to-vehicle and
vehicle-to-infrastructure
communications. In order to
provide cost effective solutions
to potential security threats it
is necessary to assess the
relative risks posed by these
threats. In the IT security
community, methods for assessing
the “attack potential” for
threats against system assets
are already established (ISO/IEC
18045). However, the attack
potential is essentially a
measure of the probability of an
attack, while the concept of
risk reflects not only the
probability of occurrence of a
hazard, but also the severity of
the outcome. Since it is
possible that security issues
may also impact on the
functional safety of vehicles,
where risk analysis methods are
already established (ISO 26262),
it is desirable to adopt an
analogous approach for assessing
automotive security risks. The
development of such an approach
has formed part of the work of
the EU collaborative research
project EVITA (“E-safety Vehicle
Intrusion proTected
Application”).
The starting points for the
security risk analysis were a
set of use cases that represent
different classes of application
that could be implemented for
networked vehicles and which
assume a generic vehicle network
architecture based on the EASIS
project. Potential threats were
identified by brainstorming and
documented using an “attack
tree” approach. Relative risks
were associated with the threats
by assessing relative severity
at the higher levels of the
attack tree and working up
probabilities from the attack
potential estimates associated
with the terminal nodes, which
reflect particular attacks on
specific assets (“asset
attacks”). The assessment of
security severity was based on
the severity classification used
in vehicle safety engineering,
augmented to reflect the
potential for multiple vehicles
to be involved and the fact that
aspects other than safety may be
compromised by the attack.
Additional security aspects
considered in EVITA included
financial, privacy and
operational threats. This
approach results in a “severity
vector”, with four components
that may each have different
ratings. However, the components
may translate to different
relative risk levels, depending
on the probability measures that
are applied to assess the
associated risk level.
Consequently, the relative risks
are also represented (in
principle) by 4-component
vectors.
Security requirements were also
investigated based on a number
of key security properties.
These included confidentiality,
privacy, non-repudiation, access
control, availability,
integrity, authentication of
origin and freshness. Subsets of
the security requirements were
also attributed to the asset
attacks, so that relative risk
could also be mapped to the
security requirements. This
allows the subsequent design of
security measures that implement
these requirements to be
prioritised based on the risk
analysis. This approach ensures
that finite development budgets
are targeted in a cost effective
manner to achieve the security
objectives.
|
|
Efficient Broadcasting, through
Irresponsible Forwarding, in
Intelligent Transport Systems |
Stefano Busanelli,
Gianluigi Ferrari,
Sooksan Panichpapiboon
(University of Parma/Italy, King
Mongkut’s Institute of
Technology, Bangkok, Thailand)
In the last decades, Intelligent Transportation Systems
(ITSs) have attracted the attention of a large number of
researchers, companies, and public governments from all over
the world. Thanks to these huge efforts, “smart vehicles” are
becoming a reality and it is now possible to think of totally
autonomous vehicles. However, intelligent vehicle driving is not
sufficient to implement ITSs, but efficient Vehicle-to-Vehicle
(V2V) and Vehicle-to-Infrastructure (V2I) communications are
neeeded.
Today, we assist to the advent of the first GPS-based navigation
systems that are able to share and collect information related to
the traffic and road conditions, leveraging on pre-existing communication
networks, such as cellular networks. These systems
could be a real “Trojan horse” able to seamlessly introduce the
customers to ITS-related applications. For these reasons, one
can consider automotive navigation systems as the first building
blocks of future ITSs. What is still missing is a Dedicated Short-
Range Communications (DSRC) framework able to offer affordable,
reliable, and low latency inter-vehicular communications,
that are unavoidable in many contexts, as for safety-related (i.e.,
collision prevention) or peer-to-peer infotainment applications.
According to the IEEE 802.11p protocol and ISO Communications,
Air-interface, Long and Medium rang (CALM)
standardization efforts, a DSRC system has to rely on both
unicast and broadcast forwarding protocols, since it has to
support a large variety of applications. A unicast routing scheme
is appropriate for forwarding an information packet from a
source to a specific destination, while a broadcasting scheme is
appropriate for disseminating an information packet throughout
the network. Since the traffic information is usually of public
interest, rather than of individual interest, it is suitable to
disseminate the traffic information by broadcasting. How well
the information can be spread depends on the efficiency of the
broadcasting protocol under use.
In this paper, we describe a novel probabilistic-based broadcasting
framework, denoted as Irresponsible Forwarding, which
we have been developing in the last year. The key idea is that
each vehicle rebroadcasts a received data packet on the basis
of (i) its distance from the source and (ii) the density of its
neighbors (i.e., by taking into account the environment). The key
idea is that a node implicitly evaluates the probability that there
is another node which can rebroadcast more successfully: if this
probability is sufficiently high, then the node “irresponsibly” does
not rebroadcast. Unlike other existing probabilistic forwarding
schemes, IF also takes the statistical distribution of the vehicles on
the road into consideration.Moreover, for sufficiently large values
of the vehicle spatial density, the average number of rebroadcast
packets can be regulated by properly tuning a single parameter.
As a meaningful practical implementation of the IF protocol,
we consider its application to IEEE 802.11 networks. Our attention
concentrates on its Medium Access Control (MAC) layer,
which is affected by some critical impairments in broadcasting
applications, such as the hidden terminal problem and selfinterference.
The performance analysis of the IF protocol in
IEEE 802.11 networks will be carried out considering several
meaningful metrics and its benefits, with respect to simpler
strategies (e.g., flooding), will be shown. In this realm, we also
analyze the impact of vehicle mobility, considering the impact of
possible existing models.
Finally, as a possible improvement of the IF protocol, we
also present Cluster-based Irresponsible Forwarding (CIF), an
attempt to integrate the IF strategy with a loosely structured
clustered architecture. The clusters of vehicles that naturally form
in VANET are typically “ephemeral” and tend to be a source
of network congestion, that penalize the performance of “pure”
probabilistic approaches. CIF attempts to recognize the presence
of ephemeral clusters and adapts its forwarding strategy to the
underlaying instantaneous network topology. In other words, CIF
does not impose a clustered architecture but, rather, exploits the
naturally ephemeral clustered architecture of VANETs.
|
| 15:00 – 15:30 |
Coffee break |
|
15:30 – 16:30 |
Technical session 7: Wireless systems and technologies II
Session Chairman: G�rard S�garra (Renault, France)
|
|
Spatial Diversity for IEEE
802.11p V2V Safety Broadcast in
a Highway Environment |
Robert Piechocki,
Angela Doufexi
and Nor Fadzilah Abdullah
(Centre for Communications
Research, University of Bristol,
UK)
Wireless Access Vehicular Environments (WAVE) is a new
standard proposal to allow fast and reliable direct communication
between vehicles in a rapidly changing node density,
topology and Doppler shifts. Many standardization bodies
and car manufacturers have set up projects to develop this
upcoming technology. WAVE is intended to be one of the
solutions to reduce road accident that claimed millions of
lives around the world. In the year 2007, the European Union
recorded about 43,000 deaths and more than 1.8 million
injuries, which amounts to almost 160 billion Euros loss [1].
In the current IEEE 802.11p draft [2], the frame format
and antenna design principles have not been finalized yet.
Therefore, this paper proposes MIMO antenna and Space
Time Block Codes (STBC) schemes for vehicular-to-vehicular
(V2V) 1-hop broadcast safety messages. The scenario considers
two types of safety messages at 5.9 GHz Control Channel
(CCH), the periodic status message (PM) and the eventdriven
emergency message (EM) during a vehicular accident.
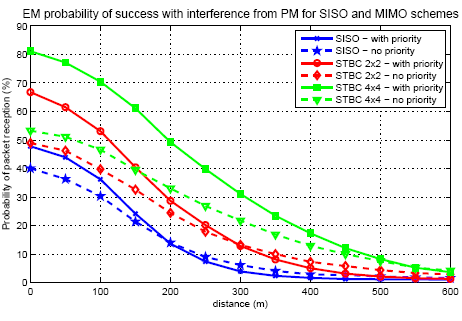
The probability of successful reception of EM messages are
analyzed with PM messages acting as interference.
A number of contributions are presented here. Firstly, a
detailed physical layer simulator is developed to analyse the
performance of Alamouti 2x2 STBC [3] and Tarokh’s 4x4
STBC [4] against single antenna system (SISO). A time and
frequency selective Rayleigh channel based on Clarke’s model
with an rms delay spread of 100ns is used, in agreement
with the highway channel measurements reported in [5].
Due to vehicular time varying channel, the preamble training
sequence is no longer sufficient to successfully decode the
message. Thus, midamble channel estimation that reuses the
preamble training is placed at a predetermined OFDM symbol
spacing [6]. Based on the assumption of 500 bytes payload and
default QPSK 1/2 modulation in IEEE 802.11p, our analysis
shows that 30 OFDM symbol midamble spacing offers the
best overhead and error performance for all schemes.
Secondly, the vehicular-specific BER reception models from
the Physical layer simulator are incorporated into the Qualnet
[7] network simulator. It is shown that at 10% PER, 2x2
Alamouti STBC gives 3.4 dB coding gain at full throughput
and Tarokh’s STBC 4x4 gives 7.8 dB coding gain with the
downside of having only 3/4 throughput as compared with
SISO at a relative speed of 100 km/h.
Realistic 3-lane bidirectional highway traces obtained from
HWGui [8] are incorporated as the mobility model in Qualnet.
The traces cover a 15 km stretch of highway, and near 1000
vehicles in a high density traffic. The network simulator is
modified to incorporate the parameter changes as specified in
the IEEE 802.11p, such as reduction of channel bandwidth to
10MHz and higher interframe spacings, slot time and preamble
duration. This provides higher tolerance to delay spread but a
half reduction to the maximum data rate of IEEE 802.11a/g.
Figure 1 shows that with basic CSMA, at 30% probability of
EM reception, 2x2 and 4x4 STBC increase SISO communication
range (CR) by 75% and 125%. Meanwhile, with EDCA
(Enhanced Distributed Channel Access) QoS prioritization of
EM over PM, SISO CR increases by 25% compared to SISO
without prioritization. With 2x2 STBC and 4x4 STBC, this
CR is further increased by 75% and 140% accordingly. This
finding proves that MIMO-STBC is a very effective solution
towards extending the drivers’ awareness horizon.
|
|
Virtual single cells over a
micro-cellular network along
roads supporting vehicular
multimedia |
Takahiko Yamada,
Phan Thanh Hoa
(Ritsumeikan University, Japan)
In the future of mobile communications, a new paradigm as
shown in Fig. 1 will become inevitable to offer ubiquitous and mobile
multimedia communications to general and vehicular users, though
new technology like 3G LTE and beyond have shown great progress. In
this view, macro-cellular and micro-cellular networks seem to be united
with the vertical handover and cooperate with each other under the
control of the IP-based paging network. Authors have been studying a
mobile network named MM-MAN (Mobile Multimedia MAN) for
vehicles with connected micro-cells along roads that can be seen as a
component network of the above paradigm. The network offers a
virtual single cell circumstance to each vehicle for communications to
overcome the quick traverse between micro-cells of fast vehicles. It can
provide rich radio resources through micro-cells and smooth packet
transfer for multimedia communications based on the virtual single cell.
In MM-MAN, a set of polling are sent in each micro-cell of an LMC
(Logical Macro-Cell) consisting of adjacent micro-cells. In the LMC,
packets are transferred in the center cell where the polling response
comes. The target MT (Mobile Terminal) can respond in any cell in the
LMC because the LMC connects together clusters of micro-cells to be a
virtual single cell. Resources are prepared in advance before the
terminal needs them. The LMC is switched over to the next LMC when
the response comes to the next cell. The switchover can be handled at a
suitable time while the target MT stays in the same micro-cell for these
two LMCs as shown in Fig. 2. This procedure for the target MT
continues provided that it still stays in MM-MAN, and the connected
LMCs are always kept as virtual single cells for the target MT during
active time.


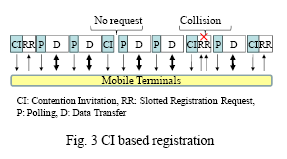
In order to accept the polling-based packet transfer, each mobile
terminal should register to the network. For the registration, the CI
(Contention Invitation) mechanism as shown in Fig.3 is used. The CI is polling
procedure to the anonymous MT that is broadcast to invite MT’s registration if
they want to connect to the network. The answering process can be collided
between MTs. Collision problem can be solved by power control or randomized
response for several CI calls at each MT. The registration takes two steps: the
first is on the minimized slot sending MT’s ID, and the second is the
registration of the information in the polling-based packet transfer. The using of
minimized slot aims to avoid inefficiency in collision.
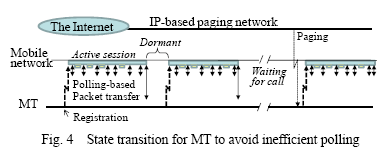
In the polling based packet transfer, network becomes inefficient
if all registered MTs are polled regardless their active sessions.
Thus, the polling to each MT has to stop and becomes dormant
when the active session of packet transfer finishes. The CI based
registration described above is conducted when new packet
transfer session is started. The target MT sometimes gets into
waiting state after the negotiation between the network and the
target MT. The CI-based registration from MT or paging from the
IP-based paging is controlled by the network side.
In order to make the above-described concept complete, this paper discusses exceptional conversations between the network and
the terminal for various conditions such as weak radio power or overlapping of radio power from a number of cells.
This paper also shows the smooth packet transfer to fast MTs, the performance of each MT and the network. These evaluations
use the OMNeT++ simulator. In this study, the parameters are borrowed from the 802.11 WLAN so far.
|
|
Opportunistic Vehicular Networks
by Satellite Links for Safety
Applications |
Anna Maria Vegni,
Claudio Vegni,
Thomas D.C. Little (University Roma Tre, Italy, Thales Alenia Space, Italy, Boston University, USA)
Satellite radio is one of a complementary set of network connectivity technologies in future vehicles
equipped with on-board computers. Others include Bluetooth, Wi-Fi, WiMax, UMTS, and DSRC.
Collectively these technologies can enable vehicle-to-vehicle and vehicle-to-Internet connectivity, but under
different operating conditions.
When a vehicle is driving alone in an area that is devoid of telephony infrastructure area (i.e., a rural area
during night hours), or it is in a disaster and emergency situation, a satellite network can provide service
connection.
In this paper we investigate the relationship between satellite radio connectivity and other opportunistic
connectivity schemes that rely on short-range communication. We also describe an opportunistic vehicular
networking scheme for safety applications, based on satellite communication links (i.e., LEO/MEO satellite
constellations). In such scenario (see Figure 1 (left)), a vehicle (called as isolated vehicle) is driving alone on
the road (i.e., the traffic density reaches the minimum value), and no radio coverage (e.g., no Wi-Fi access
points, or cellular base stations).
In this example, the isolated vehicle seeks to send an SOS message to any neighboring vehicle to alert
about an accident occurred. The SOS message (where the vehicle’s position is stored) is sent to the satellite
in view (i.e., LEO/MEO satellite constellations) by the vehicle (uplink connection). The satellite receives the
message, processes the vehicle’s position information, and calculates the distance of the source vehicle
respect to three/four reference positions (e.g., in the simulations we considered North, South, East, and West
Rome). Consequently, the SOS message will be forwarded to the cluster of vehicles, closest to the isolated
source vehicle (“forward link”). When the cluster of vehicles receives the SOS message, it will send an
acknowledgment (return message) to the satellite in visibility, which forwards it to the isolated vehicle
(“return link”). The proposed scheme shows how the satellite connectivity can solve the problem of seamless
and ubiquitous connectivity, when a vehicle is driving alone in an isolated area. The satellite works as
‘bridge’, in order to connect the vehicle to the closest cluster of vehicles, driving in an urban area.
A physic layer analysis has been addressed in order to evaluate (i) the minimum distance among cluster of
vehicles and isolated user vs. satellite orbit (LEO/MEO tradeoff), (ii) the service availability along a selected
time window (e.g., from 0 a.m. to 6 a.m.), (iii) the LEO/MEO satellites visibility from uplink and downlink
coverage (“end-to-end” visibility), (iv) link feasibility and availability (i.e., “end-to-end” Signal-to-Noise and
Interference ratio), (v) forward and return link delay, and payload dimensioning. An example of visibility
analysis for MEO constellation (i.e. Galileo) is reported in Figure 1 (right). Our technique is intended to
augment short and medium-range communication to bridge isolated vehicles or clusters of vehicles when no
other mechanism is available.
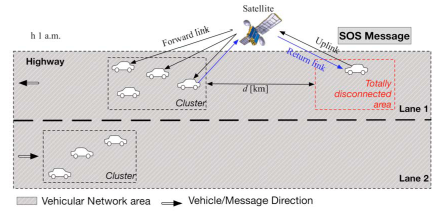

Figure 1. (top) Novel opportunistic networking scheme in a VANET scenario with satellite connectivity for safety
applications. (bottom) Forward link end-to-end (E2E) visibility, Rome city vs. East Rome.
|
|
|
|
|
|
|
| 16:30 – 17:00 |
Wrap-up and Conclusions
|
|
ITS World Congress 2010 |
Young-Jun Moon (Korea Transport Institute (KOTI), Korea) |
|
Conclusions |
Reinhard Scholl (Telecommunication Standardization Bureau, International Telecommunication Union (ITU, TSB)) |
|
|
|
|
17:00 |
Closing |
|
|
|
|
|


